Wiring¶
What you need¶
-
DC supply in the 12–24 VDC range
-
Step/dir motor driver (open-loop or closed-loop) and a motor already wired together.
-
Screwdriver for the terminals, and your limit switch or proximity sensor if you plan to use one.


Connect in this order¶
- Power (leave the connector plug disconnected until you finish up wiring): connect your DC supply to the power input plug/terminal (observe polarity). Axis powers up from this terminal and provides 5V logic to the
STEP/DIR/ENandLIMlimit switch headers.
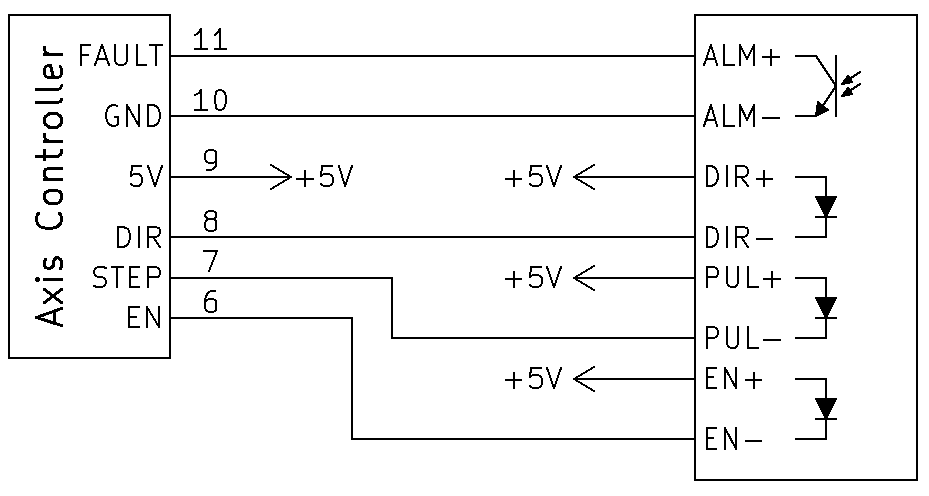
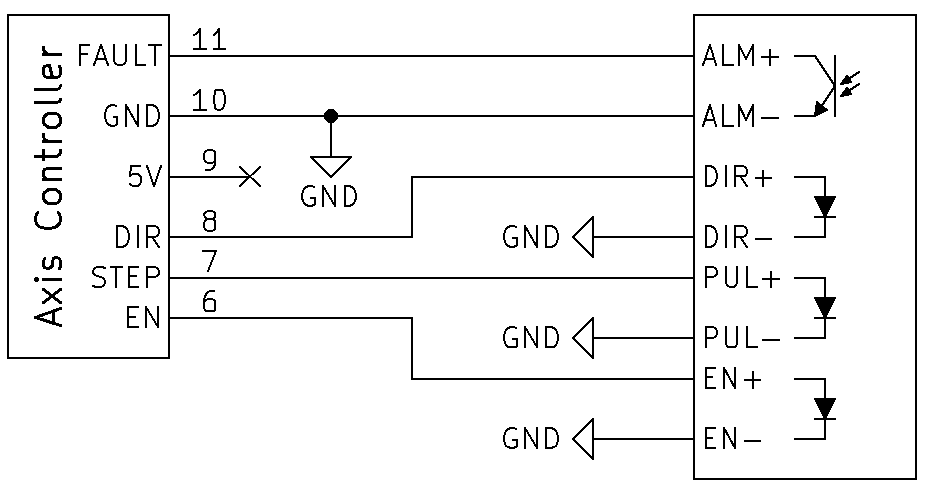
STEP/DIR/EN (driver control):¶
STEP→ driverPUL/STEPDIR→ driverDIR,EN→ driverEN/ENAif you use it.- Share ground:
GNDon Axis → driver signal ground. - Use
5Vonly as a logic reference for opto-isolated inputs, not to power loads. - See the wiring diagrams for common-anode vs common-cathode options.
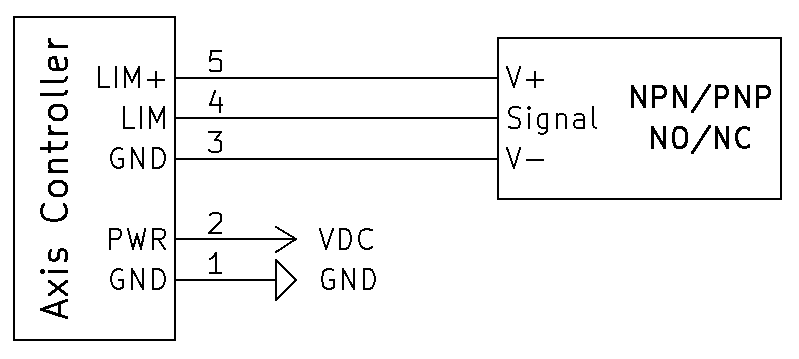
Limit switch input:¶
Wire your switch/sensor to LIM+, LIM, and GND, then set the polarity in Settings → Limit Pin according to your sensor type.
(Optional) Fault/Alarm:¶
If your driver exposes an alarm output, connect it to the ALM+, ALM- terminals (open-collector to ground) so Axis can detect alarms.
Note
Double-check connections before applying power. If you plan to change wiring later, power down Axis first.
First power-on and setup¶
-
Apply DC power. The display will come on and the controller will be in a disabled state.
-
Press
MENUto enable/disable the motor motion. (When disabled, motion commands are ignored.) -
Enter the Settings menu with a long press on
MENU. Navigate the settings menu withUP/DOWN; change values withB+/B-(long press for faster changes); exit and save settings with pressingMENUagain.
Quickstart configuration:¶
-
First select the units to use (
mm,in, ordeg). -
Configure the spepper motor according to your application (See settings)
-
Steps per Revolution (include microstepping from your driver).
- Units per Revolution (lead screw pitch for linear applications or 360° for rotary).
- Max Speed and Acceleration appropriate for your driver/motor.
-
Pin polarities if your driver or limit switch needs inverted signals.
-
Exit Settings (press
MENU) to save.
Warning
Changing units is hard-resetting to default all setings in the controller. Only switch units when you need to controll a stepper motor in new application.
Make your first move¶
Moving on demand¶
Press B+ / B- to move while held.
Moving continuous¶
Long-press A+ / A- to start continuous motion; tap on any button to stop. Use the speed knob to dial the speed even while moving.
Step mode¶
Tap SHIFT + UP/DOWN to pick the step size that matches your task. Tap on UP/DOWN to move one step at a time.
Homing¶
-
Homing on a limit switch: Hold
SHIFTand pressMENU(while enabled) to start homing towards your configured Homing Direction and speed. Homing must see the limit switch in the allowed direction; otherwise it will stop and show an error. -
Virtual Home: Tap on
MENUwhile the controller is seeking for home to set a virtual home zero position (quick homing at any position without using a limit switch). -
Clear home position: To clear out a previously set home position, initiate homing sequence and tap on any button other then
MENU.
Troubleshooting¶
-
No motion: ensure you pressed
MENUto enable, check wiring to STEP/DIR/EN and shared ground, and reduce Max Speed/Acceleration. -
Stops immediately with an error: check the limit wiring/polarity and whether the axis thinks it is already homed and at a limit.
-
Wrong distance per step: re-check Steps per Revolution and Units per Revolution.
-
Contrast or unreadable screen: adjust Contrast in Settings.
-
STEP / DIR / EN / FAULT / 5V / GND: 5 V logic signals to your driver.
5Vis only a reference for opto-isolated inputs; do not power loads from it. Defaults are active-high; flip polarity in Settings / Settings / Settings if needed. -
Limit header (LIM+ / LIM / GND): LIM+ feeds your sensor (12–24 V derived from Axis supply), LIM is the signal, and GND is reference.
-
Power: DC supply into the main power terminals; observe polarity and stay within 9–27 VDC.
Motor driver wiring¶
Limit/terminal switches¶
LIM+: 12–24 V output from Axis for powering your sensor.LIM: Sensor signal.GND: Ground reference.
Warning
NPN sensors need one extra part: add a 4.7K resistor between LIM+ and LIM (pull-up) so the signal can go high.
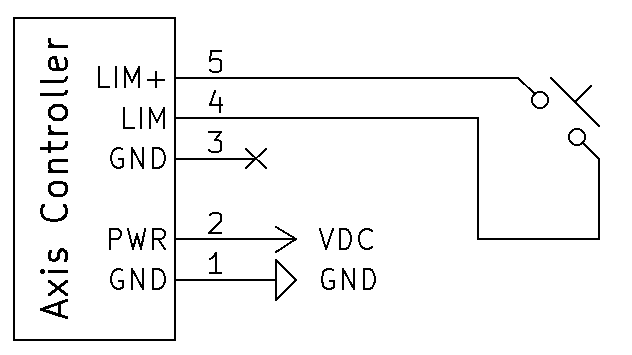
Wiring and trigger polarity¶
| Sensor type | Switch type | Limit pin trigger | Wiring |
|---|---|---|---|
| Mechanical switch | Normally open | Rising edge |
Switch shorts
LIM+ to LIM when hit.
|
| Mechanical switch | Normally closed | Falling edge |
Switch opens
LIM+ to LIM when hit.
|
| NPN | Normally open | Rising edge |
|
| NPN | Normally closed | Falling edge |
|
| NPN | Normally Open | Falling edge |
LIM+ → LIM (3K3K–10K)
|
| NPN NC | Normally Closed | Rising edge |
LIM+ → LIM (3K3K–10K)
|