Limits & Homing#
Free movement when home position is unknown#
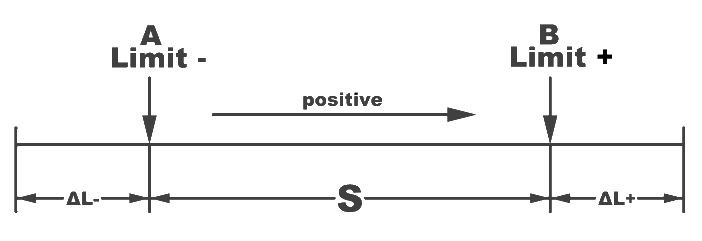
Axis will freely rotate the motor when the home position is unknown (homing sequence not yet performed)
until it reaches a limit switch where it will either stop or reverse depending on the Bounce setting.
If Bounce is Forward or Both and the motor is moving in the forward direction
then the motor will reverse when the limit switch is triggered (position B). The motor will overshoot
by an amount ΔL+ which depends on the current motor velocity and acceleration.
If Bounce is not enabled for the forward direction then the motor will just
stop when the limit switch is triggered (position B).
If Bounce is Backward or Both and the motor is moving in the backward direction
then the motor will reverse if the limit switch is triggered (position A). The motor will overshoot
by an amount ΔL- which depends on the current motor velocity and acceleration.
If Bounce is not enabled for the backward direction then the motor will just
stop when the limit switch is triggered (position A).
E.g. If two limit switches are connected in parallel and Bounce is Both,
if a continuous motion is started by long pressing A- or A+ then the motor will continuously move between
the two limit switches.
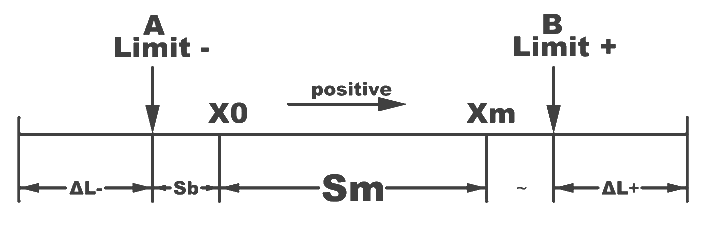
Movement with home position known#
If the home position is known (successful homing sequence performed) then the motor is
allowed to move between zero (position X0) and Position Max (position Xm).
The allowed range of motion is denoted in the next figure as Sm.
In the Sm range there must be no trigger from any limit switch.
If the limit switch is triggered while the motor moves between X0 and Xm then axis will
halt and indicate an error has occurred (the display will show Status 101).
Sometimes we want the home position to be at some specific distance from the limit switch
and is denoted by the symbol Sb in the next figure. The distance Sb is called
the Backoff distance and configurable via the Backoff Distance parameter.